On est homologable !!!

|
| Grincheux |

Grincheux
|
Description :
Grincheux est commandé par un 68HC11. Il possède des capteurs infra-rouge pour détecter les
lignes ainsi que des capteurs de contact pour réagir en cas de choc. Sa puissance de
calcul lui permettra d'utiliser les lignes pour se repérer sans forcément les suivre.
Avancement :
Il a fait ses premiers pas sur le terrain ! Les cartes élec sont OK. Et la méca tient le coup. Il faudra trouver une
solution aux chenilles qui patinent un peu et l'empêchent de monter la côte facilement. Au niveau du programme, le
déplacement est commandé au timers pour l'instant, il faut encore implanter toute l'utilisation des capteurs.
Il reste aussi à installer les batteries correctement, faire une coque de protection et mettre la pointe pour percer.
|
|
| Prof |

Prof
|
Description :
Prof est commandé par un PIC 16F84. Il possède des capteurs infra-rouge pour détecter les
lignes. Sa mission sera de suivre les lignes jusqu'aux ballons pour les crever.
Avancement :
Premiers pas émus sur le terrain ! Toute l'élec est montée et réglée. La méca est OK également. Reste l'info. Pour l'instant
le robot tourne avec un programme d'une autre PMI et les diodes de tests clignotent correctement au passage des lignes.
Il faut donc maintenant développer son programme pour suivre les lignes efficacement.
Il reste aussi à faire une coque de protection et mettre la pointe pour percer.
|
|
| Joyeux |

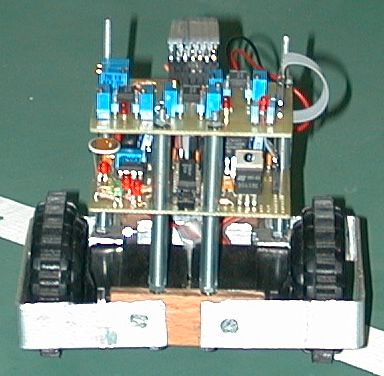
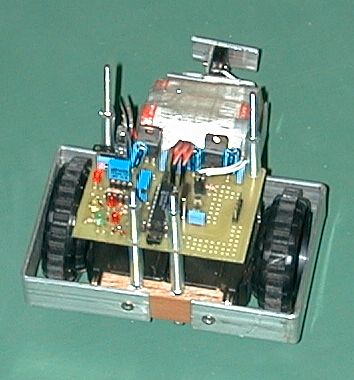
Joyeux
|
Description :
Joyeux est commandé par un PIC 16F84. Il possède un récepteur infra-rouge pour détecter les
balises et un capteur de contact. Sa mission sera commencer son parcours aux timers puis de trouver les balises sur les ballons mobiles
et s'en rapprocher pour les crever.
Avancement :
Il a crevé le premier ballon Fribotte ! L'émission/réception IR fonctionne. Une balise a été faite, il reste à en faire
d'autres à l'identique et régler les inclinaisons des diodes d'émission et du récepteur. La méca est ok, sauf l'installation
de la pointe qui est plutôt bricolée pour le moment (cf photo) et la coque à faire. L'info est opérationnelle. Quelques réglages sont encore
nécessaires pour la partie aux timers.
|
|
| Simplet |

Simplet
|
Description :
Simplet est commandé par un PIC 16F84. Il possède uniquement un capteur de contact. Sa mission
sera d'effectuer son parcours aux timers vers les ballons.
Avancement :
Il roule et roule et roule sur le terrain ! L'élec est OK et le programme aussi, aux réglages sur le terrain près.
|
|
| Et les autres.... |
|
Ils progressent lentement mais sûrement... Mais ils ne sont pas encore avancés pour avoir fait partie de la démo homologative de
cette fois-ci ! Mais ne vous en faites pas, ils seront de la fête ! :-)
|
| Blanche manège |

Vue de côté
|

Vue penchée (!)
|
Rien de nouveau sur Blanche Manège, mais on a quand même vérifié que les PMI tiennent dedans sans dépasser des dimensions.
Résultat : c'est tout bon !
|
| Conclusion |
On a fait quelques modifications majeures : tous les robots auront des pointes pour percer les ballons. On laisse
tomber les fils chauffants vu qu'on n'a pas le temps de les mettre au point correctement. Il n'y a rien à commander pour la
pointe et ça simplifie pas mal de choses. L'accent est mis sur l'efficacité des robots à 45 jours de la coupe.
Une chose est sûre maintenant : on sera là à la Ferté et avec des robots ! Et même que si ça se trouve, ils
marcheront encore ;-)

Au premier ballon crevé !
|